6.9 交流法潮流计算
1、实验目的
潮流计算是电力系统中非常重要的分析计算,指在给定电力系统网络拓扑、元件参数和发电、负荷参量条件下,计算有功功率、无功功率及电压在电力网中的分布。
从数学上看,交流法潮流计算(PF)是求解一组由潮流方程描述的非线性代数方程组。通过该应用案例,展示低代码控制器非线性方程(NLSOLVE动作)求解功能。
2、实验原理
对于一个N节点电网,其潮流方程(极坐标形式)如下所示:
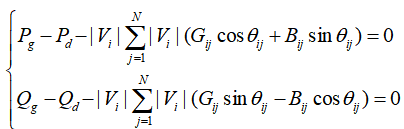
对于PQ节点,已知量为节点负荷的有功与无功功率,未知量为节点电压幅值V、相角θ以及发电节点的无功输出Qg;对于PV节点,已知量为节点的有功功率和电压幅值V,因此加入约束条件Vi=已知幅值;对于平衡节点已知电压幅值与相角,因此加入约束条件Vi=1,θ=0。
3、实验步骤
本交流法潮流计算的对象选取为matpower中的case5标准算例。具体步骤如下
3.1、测点配置
测点配置表格的内容包含了测点的点号、名称、别名、是否离散、是否是计算点以及默认值等。点号是程序里给这个测点的编号,可以自己定义,使用时,测点与通信通道的点号一一对应完成对接。别名是英文字母与下划线组合使用,可以当做变量名用于AOE表格里表达式的书写,使之可以不用点号来表达,使得表达式的意思表达得更加清楚。本案例测点配置如下:
| 序号 | 点号 | 名称 | 别名 | 是否离散 | 是否计算点 | 默认值 | 备注 |
|---|---|---|---|---|---|---|---|
| 1 | 100001 | 测点1 | DoCal_POINT | TRUE | FALSE | 0 | 计算控制 |
| 2 | 100002 | 测点2 | v1 | FALSE | FALSE | 1 | 节点1电压幅值 |
| 3 | 100003 | 测点3 | v2 | FALSE | FALSE | 1 | 节点2电压幅值 |
| 4 | 100004 | 测点4 | v3 | FALSE | FALSE | 1 | 节点3电压幅值 |
| 5 | 100005 | 测点5 | v4 | FALSE | FALSE | 1 | 节点4电压幅值 |
| 6 | 100006 | 测点6 | v5 | FALSE | FALSE | 1 | 节点5电压幅值 |
| 7 | 100007 | 测点7 | theta1 | FALSE | FALSE | 0 | 节点1电压相角 |
| 8 | 100008 | 测点8 | theta2 | FALSE | FALSE | 0 | 节点2电压相角 |
| 9 | 100009 | 测点9 | theta3 | FALSE | FALSE | 0 | 节点3电压相角 |
| 10 | 100010 | 测点10 | theta4 | FALSE | FALSE | 0 | 节点4电压相角 |
| 11 | 100011 | 测点11 | theta5 | FALSE | FALSE | 0 | 节点5电压相角 |
| 12 | 100012 | 测点12 | qg1 | FALSE | FALSE | 0 | 发电机1无功输出 |
| 13 | 100013 | 测点13 | qg2 | FALSE | FALSE | 0 | 发电机2无功输出 |
| 14 | 100014 | 测点14 | qg3 | FALSE | FALSE | 0 | 发电机3无功输出 |
| 15 | 100015 | 测点15 | qg4 | FALSE | FALSE | 0 | 发电机4无功输出 |
| 16 | 100016 | 测点16 | qg5 | FALSE | FALSE | 0 | 发电机5无功输出 |
| 17 | 100017 | 测点17 | pg_balancenode | FALSE | FALSE | 0 | 平衡节点有功输出 |
3.2、AOE配置
本案例中AOE文件配置内容分为三个部分。
AOE网络声明
名称为交流法潮流计算,触发条件设置为事件驱动(Event_Drive)。
| AOE ID | 是否启用 | 名称 | 触发条件 | 触发条件参数 | 变量初始值 |
|---|---|---|---|---|---|
| 70001 | TRUE | 交流法潮流计算 | Event_Drive | V1:1;V2:1;V3:1;V4:1;V5:1; THETA1:0;THETA2:0;THETA3:0;THETA4:0;THETA5:0; QG1:0;QG2:0;QG3:0;QG4:0;QG5:0; PG_balancenode:0 |
AOE节点声明
| AOE ID | 节点ID | 名称 | 节点类型 | 超时时间(ms) | 表达式 |
|---|---|---|---|---|---|
| 70001 | 1 | 开始节点 | Condition | 10 | DoCal_POINT > 0.5 |
| 70001 | 2 | 计算节点 | Condition | 10 | 1 |
| 70001 | 3 | 幅值 | Condition | 10 | 1 |
| 70001 | 4 | 结束节点 | Condition | 10 | DoCal_POINT == 0 |
本案例中共有4个节点,节点类型均为Condition,表达式设为1,表明始终满足条件触发执行。
AOE边声明
| AOE ID | 首尾节点 | 动作名称 | 失败模式 | 动作类型 | 动作参数 | |
|---|---|---|---|---|---|---|
| 70001 | 1;2 | 进入交流潮流计算 | Default | Set_Points | DoCal_POINT:0; | |
| 70001 | 2;3 | 计算交流潮流 | Default | NLSOLVE | 2.10000000-0.00000000-V1*(V1*(22.25068569)+V2*(-3.52348402cos(THETA1-THETA2)+35.23484021sin(THETA1-THETA2))+V4*(-3.25690464cos(THETA1-THETA4)+32.56904638sin(THETA1-THETA4))+V5*(-15.47029703cos(THETA1-THETA5)+154.70297030sin(THETA1-THETA5))); 0.00000000-3.00000000-V2*(V1*(-3.52348402cos(THETA2-THETA1)+35.23484021sin(THETA2-THETA1))+V2*(12.69106745)+V3*(-9.16758343cos(THETA2-THETA3)+91.67583425sin(THETA2-THETA3))); 3.23490000-3.00000000-V3*(V2*(-9.16758343cos(THETA3-THETA2)+91.67583425sin(THETA3-THETA2))+V3*(12.50125013)+V4*(-3.33366670cos(THETA3-THETA4)+33.33666700sin(THETA3-THETA4))); PG_balancenode-4.00000000-V4*(V1*(-3.25690464cos(THETA4-THETA1)+32.56904638sin(THETA4-THETA1))+V3*(-3.33366670cos(THETA4-THETA3)+33.33666700sin(THETA4-THETA3))+V4*(9.92423804)+V5*(-3.33366670cos(THETA4-THETA5)+33.33666700sin(THETA4-THETA5))); 4.66510000-0.00000000-V5*(V1*(-15.47029703cos(THETA5-THETA1)+154.70297030sin(THETA5-THETA1))+V4*(-3.33366670cos(THETA5-THETA4)+33.33666700sin(THETA5-THETA4))+V5*(18.80396373)); QG1+QG2-0.00000000-V1*(V1*(--222.48437689)+V2*(-3.52348402sin(THETA1-THETA2)-35.23484021cos(THETA1-THETA2))+V4*(-3.25690464sin(THETA1-THETA4)-32.56904638cos(THETA1-THETA4))+V5*(-15.47029703sin(THETA1-THETA5)-154.70297030cos(THETA1-THETA5))); -0.98610000-V2*(V1*(-3.52348402sin(THETA2-THETA1)-35.23484021cos(THETA2-THETA1))+V2*(--126.89785446)+V3*(-9.16758343sin(THETA2-THETA3)-91.67583425cos(THETA2-THETA3))); QG3-0.98610000-V3*(V2*(-9.16758343sin(THETA3-THETA2)-91.67583425cos(THETA3-THETA2))+V3*(--124.99987125)+V4*(-3.33366670sin(THETA3-THETA4)-33.33666700cos(THETA3-THETA4))); QG4-1.31470000-V4*(V1*(-3.25690464sin(THETA4-THETA1)-32.56904638cos(THETA4-THETA1))+V3*(-3.33366670sin(THETA4-THETA3)-33.33666700cos(THETA4-THETA3))+V4*(--99.23235038)+V5*(-3.33366670sin(THETA4-THETA5)-33.33666700cos(THETA4-THETA5))); QG5-0.00000000-V5*(V1*(-15.47029703sin(THETA5-THETA1)-154.70297030cos(THETA5-THETA1))+V4*(-3.33366670sin(THETA5-THETA4)-33.33666700cos(THETA5-THETA4))+V5*(--188.02063730)); V1-1.00000000; V3-1.00000000; V4-1.00000000; V5-1.00000000; THETA4; QG1/0.40000000-QG2/1.70000000; V1:1,V2:1,V3:1,V4:1,V5:1,THETA1,THETA2,THETA3,THETA4,THETA5,QG1,QG2,QG3,QG4,QG5,PG_balancenode | |
| 70001 | 3;4 | 赋值 | Default | Set_Points | v1:V1; v2:V2; v3:V3; v4:V4; v5:V5; theta1:THETA1; theta2:THETA2; theta3:THETA3; theta4:THETA4; theta5:THETA5; qg1:QG1; qg2:QG2; qg3:QG3; qg4:QG4; qg5:QG5; pg_balancenode:PG_balancenode; |
4、运行计算
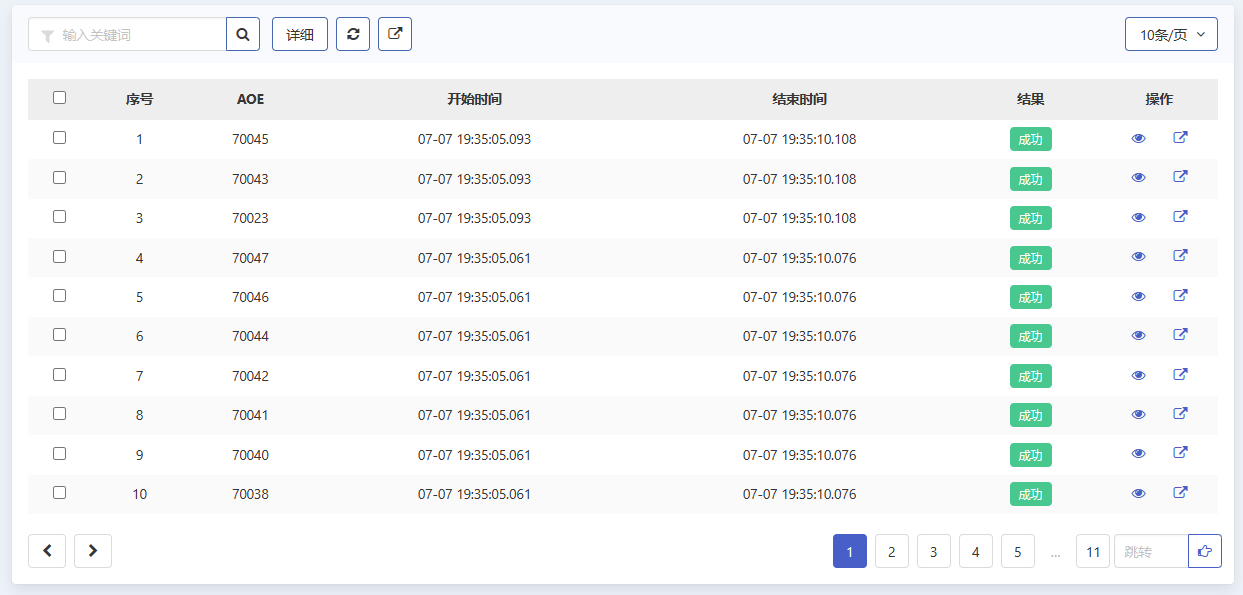
将上述配置文件上传至低代码控制器中,运行即可得到计算结果,其运算结果如下所示。
matpower计算结果如下:
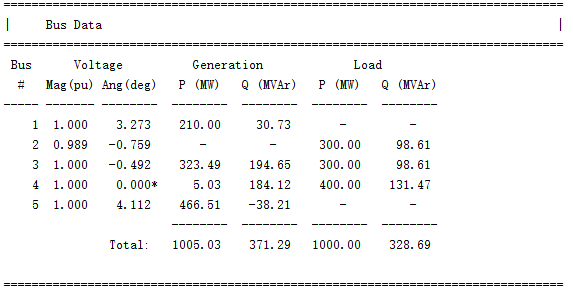
对比低代码控制器与matpower计算结果,可见低代码控制器对于交流法潮流能够精确计算。
附件:交流法潮流计算.rar